

Le GPS: comment ça marche
Votre ciel satellitaire en temps réel
Vous pouvez télécharger un petit logiciel qui vous permet de planifier votre saisie dans les meilleures conditions.
http://www.fugrosurveytechnical.com/software/multifix/geosky-ii
Erreurs & corrections
Erreurs atmosphériques :
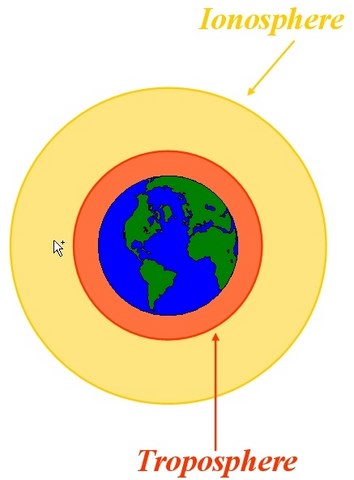
Les erreurs atmosphériques sont les sources d'erreurs les plus fréquentes pour le GPS. Comme les satellites sont en orbite à environ 20 000 km autour de la terre, les signaux GPS doivent traverser les couches de l'ionosphère et de la troposphère avant d'atteindre l'antenne réceptrice. L'ionosphère est un terme collectif identifiant diverses couches de particules ionisées et d'électrons se trouvant à des altitudes de 80 à 250 km dans l'atmosphère. L'ionisation est surtout causée par les courtes longueurs d'ondes du rayonnement solaire (rayons X et ultraviolets) au cours de la journée. Les activités ionosphériques ont le plus fort impact sur la précision du GPS.
La correction différentielle compense largement les erreurs atmosphériques.
Géométrie des satellites :
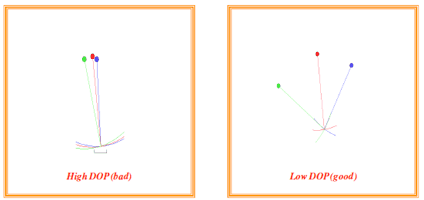
Comme le récepteur utilise une triangulation des signaux GPS pour déterminer son positionnement sur la terre, plus la géométrie des satellites dans le ciel est précise, plus la triangulation qui en résulte est précise.
L'effet de la géométrie des satellites sur les erreurs de positionnement est appelé DOP (pour Dilution of Precision ou affaiblissement de la précision). Le récepteur GPS calcule constamment la valeur DOP en fonction des satellites actuellement utilisés afin d'établir sa localisation. Meilleure est la géométrie (satellites bien répartis dans le ciel), plus faible est la valeur DOP. Si tous les satellites sont dans le même secteur du ciel ou s'ils sont obstrués par des immeubles, des montagnes, etc., la géométrie sera pauvre et la valeur DOP calculée sera élevée.
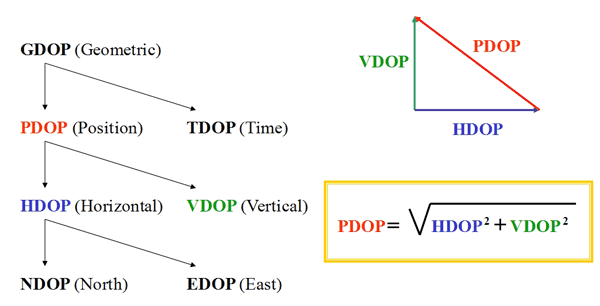
Les valeurs HDOP, VDOP, PDOP, TDOP et GDOP sont respectivement l'affaiblissement de la précision Horizontale, Verticale, Position (3D), Temps et Géométrique.
Aucune indication fixe n'établit ce qu'est une « bonne » ou une « mauvaise » valeur DOP. Sachant que la valeur DOP idéale est 1, chaque application nécessite une précision différente et permet des valeurs DOP plus élevées. Habituellement, 1 à 2 est excellent, 3 à 4 est bon, 5 à 7 est acceptable et 8 ou plus est pauvre. Cependant les entreprises forestières qui ne requièrent qu'une précision d'environ 5 m et recherchent une productivité accrue accepteront un PDOP aussi élevé que 8 à 12. La correction différentielle ne compense pas pour les erreurs de valeur DOP. La valeur DOP étant calculée par le récepteur, la plupart des logiciels GPS offrent des filtres empêchant l'opération ou l'enregistrement lorsque la valeur DOP atteint un seuil prédéterminé.
Trajets multiples :
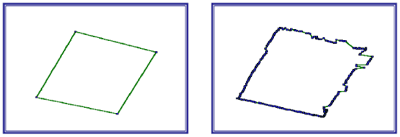
Il s'agit d'un phénomène de propagation qui fait que les signaux radio atteignent l'antenne par deux ou plusieurs trajets. Les causes de ces trajets multiples comprennent la canalisation atmosphérique, la réflexion et réfraction ionosphérique, et la réflexion d'une nappe d'eau, de montagnes, d'arbres ou d'édifices.
La correction différentielle ne compense pas pour les erreurs causées par les trajets multiples. Certaines précautions peuvent atténuer la sensibilité de l'antenne GPS à ces reflets de signaux, par exemple en s'éloignant des structures réfléchissantes comme les immeubles. Un combiné récepteur/antenne haut de gamme pourra mieux rejeter les trajets multiples, alors qu'un dispositif moins dispendieux tolérera un plus grand nombre de trajets multiples.
Erreurs de chronométrage et d'orbite des satellites :
Les satellites GPS comportent des horloges atomiques très précises et suivent des orbites déterminées. Mais des dérives sont inévitables à la fois dans l'horloge et dans l'orbite, et même une très faible dérive peut causer des erreurs dans le récepteur sur terre. Bien que l'horloge et l'orbite ne puissent être ajustées, le déport est calculé par la composante terrestre du GPS et renvoyé aux satellites. Les satellites émettent alors les données d'horloge et des éphémérides à l'utilisateur.
Il peut y avoir un délai entre le moment où déport se produit, et le moment où il est calculé et émis.
Selon la correction différentielle utilisée (locale ou globale), les effets des erreurs d'orbite et de chronométrage peuvent être largement compensés.
Le DGPS expliqué (source Wikipédia)
Le GPS différentiel (en anglais Differential Global Positioning System : DGPS) est une amélioration du GPS. Il utilise un réseau de stations fixes de référence qui transmet l'écart entre les positions indiquées par les satellites et leurs positions réelles connues. En fait le récepteur reçoit la différence entre les pseudo-distances mesurées par les satellites et les véritables pseudo-distances et peut ainsi corriger ses mesures de positions.
Le terme DGPS peut s'appliquer aussi bien à la technique elle-même qu'à des implémentations qui l'utilisent. Par exemple le WAAS de la FAA utilise des techniques différentielles pour améliorer la précision, elles transmettent les corrections par satellite sur la bande L. Parmi les autres exemples de systèmes similaires on trouve le système européen de complément à la navigation géostationnaire EGNOS, le système japonais MTSAT, le service de correction DGPS canadien et les systèmes commerciaux StarFire et OmniSTAR.
Ce terme s'applique aussi souvent de façon spécifique à des systèmes qui re-transmettent des corrections à partir de balises au sol de plus courte portée. Par exemple la US Coast Guard utilise un tel système aux États-Unis en grandes ondes entre 285 kHz et 325 kHz. Ces fréquences sont communément utilisées pour la radio en mer, et sont diffusées près des principales voies navigables et des ports. L'Australie utilise un service similaire pour la navigation terrestre et aérienne, leur signal est transmis par des stations radio AM commerciales.
La cinématique en temps réel ou RTK (source Wikipédia)
La Cinématique temps réel (Real Time Kinematic, en anglais ou RTK) est une technique de positionnement par satellite basée sur l'utilisation de mesures de phase des ondes porteuses des signaux émis par le système GPS, GLONASS ou Galileo. Une station de référence fournit des corrections en temps réel permettant d'atteindre une précision de l'ordre du centimètre. Dans le cas particulier du GPS, le système est alors appelé Carrier-Phase Enhancement ou CPGPS.
Dans le cas de récepteurs autonomes, le signal binaire pseudo-aléatoire émis par le satellite est comparé à une copie interne de ce signal. Comme les horloges des deux dispositifs sont synchronisées, la copie est générée en même temps que l'original du satellite. En raison du temps de parcours de l'onde, il y a un décalage temporel. La copie du récepteur est décalée dans le temps jusqu'à s'aligner avec le signal reçu. Le décalage temporel ainsi mesuré permet de calculer une distance (entachée d'erreurs) entre le satellite et le récepteur.
La précision de la mesure temporelle est généralement une fonction de la capacité de l'électronique du réception à comparer les deux signaux. En général les récepteurs sont capables d'aligner les signaux à une précision d'environ 1 % de la largeur d'un bit [1]. Par exemple, le signal C/A émis par le système GPS envoie un bit toutes les microsecondes, donc un récepteur est précis à 0.01 microseconde près, ce qui correspond à 3 mètres en termes de distance. Le signal P/Y utilisé par l'armée américaine est émis par les mêmes satellites à une fréquence dix fois supérieure, correspondant à une précision d'environ 30 cm. D'autres effets introduisent des erreurs plus importantes, et la précision du positionnement basé sur le signal C/A non corrigé est généralement d'environ 15 m.
Le RTK suit le même principe, mais utilise le signal analogique de la porteuse modulée par le code émis, et non le code binaire contenu dans le signal. Cela améliore grandement la précision. Par exemple, la phase du signal C/A+L1 peut changer à une fréquence de 1,023 MHz, alors que la porteuse L1 a une fréquence de 1575,42 MHz, soit plus de 1000 fois plus grande. En considérant une précision temporelle de 1 %, cela correspond à une précision spatiale de 1,9 mm en utilisant le signal L1 et 2,4 mm avec le signal L2, de fréquence plus basse (1227,6 MHz) [2].
La difficulté dans la conception d'un système RTK est l'alignement correct des signaux. Les signaux des satellites sont encodés en binaire afin de les aligner facilement, alors que chaque cycle de la porteuse est similaire à un autre. Ainsi il est très difficile de savoir si l'alignement est correct, ou s'il n'y a pas décalage d'une cycle, introduisant ainsi une erreur de 20 cm. Cette ambiguïté peut être résolue partiellement en utilisant des méthodes statistiques complexes qui comparent les mesures à partir des signaux C/A, puis en comparant des résultats obtenus entre de multiples satellites. Cependant aucune de ces méthodes ne peut faire disparaître l'erreur.
En pratique les systèmes RTK utilisent un récepteur fixe (station de base dont la position est connu précisément) et un certain nombre de récepteurs mobiles. La station de base compare la position calculée à partir du signal GPS et la position réelle, puis ré-émet les corrections à apporter vers les récepteurs mobiles. Cela permet aux unités mobiles de calculer leur position relative avec une précision de quelques millimètres, bien que leur position absolue soit aussi précise que la position de la station de base. La précision nominale typique pour ces systèmes est de 1 cm horizontalement et 2 cm verticalement.
Bien que cela limite l'utilité de la technique RTK en termes de navigation générale, elle est parfaitement adaptée à des applications telles que la surveillance ou le guidage de précision. Dans ce cas, la station de base est située à un emplacement connu qui est le point de référence, et les unités mobiles peuvent produire une carte très précise en prenant des mesures relativement à ce point. Le RTK a aussi des applications pour les systèmes de pilotage automatique, pour les travaux publics, en agriculture de précision, et autres applications similaires.
La méthode Virtual Reference Station (VRS) étend l'utilisation de RTK à une zone entière d'un réseau de stations de référence.
La fiabilité opérationnelle et les précisions possibles dépendent de la densité et des capacités du réseau de stations de référence.
Détail des composantes essentielles au RTK
Géoïde de la Terre
Un géoïde est une représentation de la surface terrestre plus précise que l'approximation sphérique ou ellipsoïdale. Il correspond à une équipotentielle du champ de gravité terrestre, choisie de manière à coller au plus près à la « surface réelle ».
D'autres infos sur Wikipédia avec le lien suivant:
http://fr.wikipedia.org/wiki/G%C3%A9o%C3%AFde